
旗众智能视觉点胶系统:无夹具化生产的工业4.0实践
工业制造场景中的点胶作业困境
在3C电子、五金饰品、半导体加工等精密制造领域,点胶工艺是产品质量保障的关键环节。然而,传统点胶设备在实际应用中面临着多重挑战:固定夹具依赖导致换产周期长、设备投资成本高;微量打点和复杂图形加工的精度难以满足高密度PCB布胶需求;运动控制、视觉识别与点胶软件由不同供应商分散提供,系统集成复杂且调试周期漫长;流水线场景中人工上下料环节制约整体产线效率。这些痛点长期困扰着制造企业的自动化升级进程。
一体化控制架构重构生产逻辑

旗众智能针对上述行业难题,构建了"运动控制+机器视觉+点胶软件"深度融合的技术体系。突破在于将分散的控制模块整合为基于PC的一体化控制器,从根本上简化了设备接线逻辑和维护难度。这种架构设计使得视觉算法与运动控制能够实现毫秒级的协同响应,为柔性生产奠定了技术基础。
全景视觉技术实现无夹具化加工
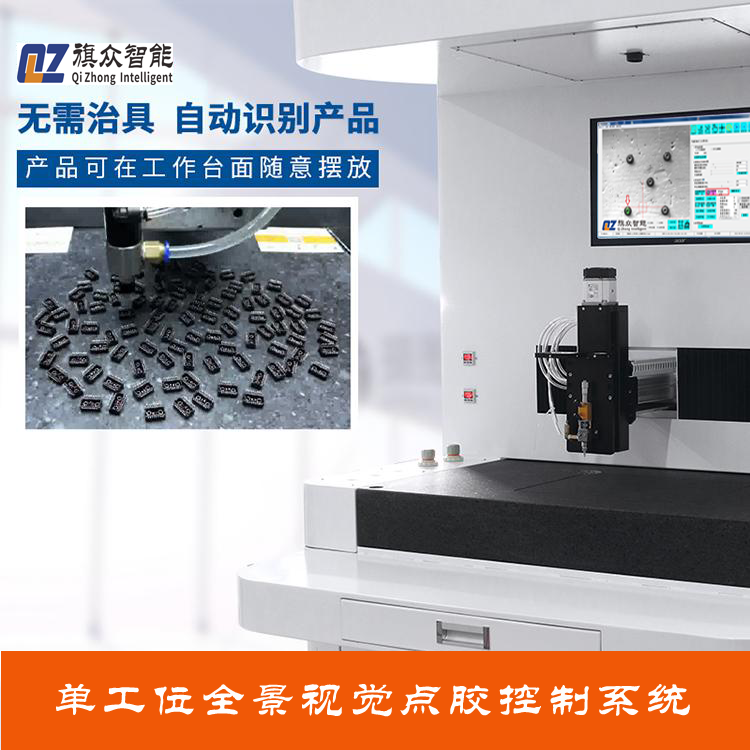
针对大批量换产场景,旗众智能推出的全景视觉点胶系统打破了传统夹具制约。该系统支持工件在300×400mm或500×600mm视野范围内任意角度摆放,通过算法在0.1秒内完成360°识别定位。这一技术突破使得制造企业无需为不同批次产品定制夹具,大幅降低了模具投入和换线准备时间。系统自带的智能识别功能可自动剔除不良品或非加工区域,配合CAD文件导入功能,实现工艺参数的数字化复用。该方案尤其适用于五金上色、灌胶等多工艺场景,支持单平台或双平台结构配置。
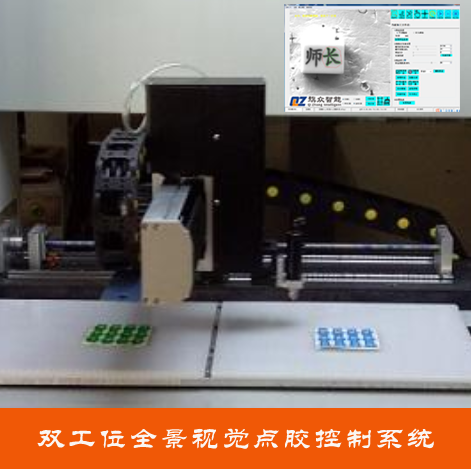
双重视觉定位解决精度与效率矛盾

对于大尺寸工件的高精度加工需求,全景+局部视觉点胶系统提供了创新解决路径。该系统融合大视野定位与高倍率局部视觉,通过组合算法实现批量定位效率与细节精度的平衡,综合误差可控制在±0.05mm范围内。这种双重视觉架构特别适合手机内部构件、半导体芯片等复杂场景,能够成倍放大工件局部细节进行精确作业。系统预留MES接口,可扩展激光测高、自动对针等增值模块,满足智能工厂的数据互联需求。
EtherCAT总线保障微米级重复精度
在医疗器械、3C电子等对点胶一致性要求严苛的领域,局部视觉点胶系统采用EtherCAT工业总线协议,将加工准确度提升至±0.02mm级别。系统支持双MARK点或多MARK点对位算法,确保点位零偏移。在路径编辑层面,可处理三维曲面、圆弧、自由曲线等复杂轨迹,并集成真空回吸、斜拉上抬、联动点胶等工艺补偿功能,保障胶量均匀性与附着牢固度。
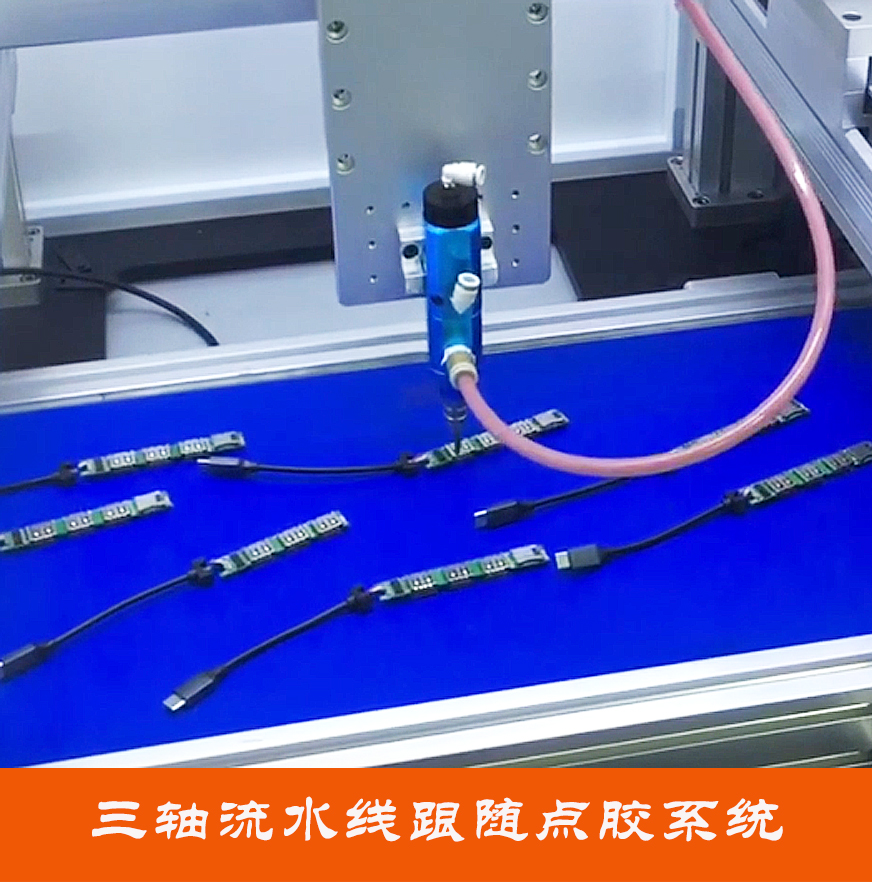
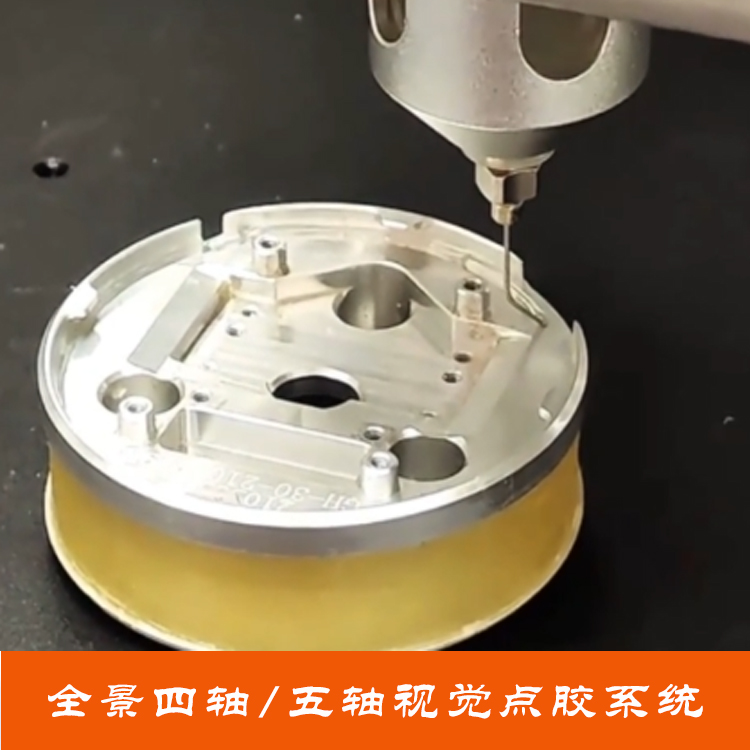
动态跟踪技术重构流水线作业模式
传统点胶设备需要传送带停顿才能完成作业,这一限制在流水线视觉点胶系统中得到根本性改变。该系统实现了胶枪与工件的同步运动跟踪,流水线无需停顿即可完成点胶作业,消除了人工上下料的时间损耗。系统支持3轴、4轴旋转、5轴双摆头等多种联动配置,可解决工件内壁、侧面等异形部位的点胶难题。双XYZ模式允许一套系统控制两组模组单独作业,设备利用率倍增。配合旋转轴算法,能够准确计算旋转偏移量,确保垂直面或弧面涂胶厚度的一致性。
机器人协作拓展柔性生产边界
针对大批量连续生产需求,机器人流水线动态跟踪点胶系统将工业机器人的高自由度与飞拍相机结合,实现多方位无死角作业。系统可根据来料疏密自动调节流水线速度或启停逻辑,适配无人化车间的节拍需求。这种配置方案能够快速对接现有柔性生产线,为企业提供渐进式自动化升级路径。
技术保障体系降低应用门槛
旗众智能建立了从前期功能评估到样机试用、远程调试的完整服务链条。其研发团队包含博士工程师负责视觉算法优化,提供24小时远程技术响应。在硬件选型上,相机与镜头采用海康、欧姆龙等工业级品牌,确保系统稳定性。这种技术保障体系有效降低了客户的选型风险和调试周期。
工业制造智能化的实践样本
从无夹具化加工到动态流水线跟踪,旗众智能的视觉点胶系统通过技术集成创新,系统性地解决了传统设备在灵活性、精度、集成度和自动化水平方面的局限。其一体化控制架构、多层级视觉定位方案、工业总线应用和动态跟踪算法,构成了面向工业4.0的完整技术图谱。对于正在推进自动化升级的制造企业而言,这种"控制-视觉-工艺"三位一体的解决方案,提供了兼顾投资效率与技术先进性的实践路径。在精密制造向智能制造演进的过程中,这类深度整合的系统正在成为产线升级的关键支撑。
相关阅读
- 美国海运查验率低的秘密:专业物流如何助力货物高效清关
- 赤峰臻岛网络科技:线上推广目标新策略,助力企业数字化转型
- 专业做账报税,筑牢合规根基 —— 泉州市金普盾财务为泉州企业
- 广州销售智能体:迈富时重构B2B增长路径的技术实践
- 六小龙电子科技:浙江专业门禁安防一站式服务商,为通道安全保驾
- 信念、定力、专注、超越!成为穿越经济周期的强者!——【日月同辉·华商财智】CEO王功晗专访
- "嗨洗呀"自助洗车:一场与爱车的对话,一场与生活的和解
- 罗浮塔艺术漆:33年匠心制造,跨越山海赢得德国市场认可
- 十载同行,共启新章|2026轩妈品牌中秋启动会暨经销商大会圆满收官
- 阿联酋集运 | 阿联酋全境派送一站式物流解决方案